最強最速のエディタviのUNIX上以外用であるVim設定の覚書です。しかし vi を使っていると「懐かしい!」という方がまれにいらっしゃいます。
基本設定
お勧め基本設定は以下のとおりです。vim74\gvimrc を以下のように編集します。
set tabstop=4
" オートインデントなし
set noai
set nu
set shiftwidth=1
set nosr
set vb " ビープ音なし
"Explore表示の設定(:Exでファイルリストが表示できる)
let g:explDetailedList=1 "詳細表示
let g:explDateFormat="%Y.%m.%d-%H:%M:%S" "Date形式
"make 関系
set makeprg=nmake.exe
set makeef=.\\make.out
fileと同じディレクトリに、中間file ~、.un~ を作らない
お勧め基本設定は以下のとおりです。vim74\gvimrc を以下のように編集します。
set directory=$LOCALAPPDATA\temp
set backupdir=$LOCALAPPDATA\temp
set undodir=$LOCALAPPDATA\temp
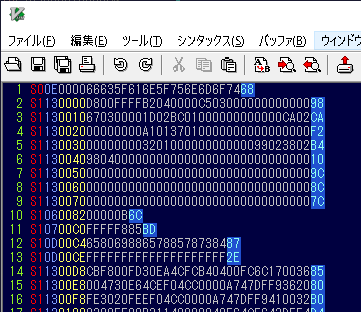
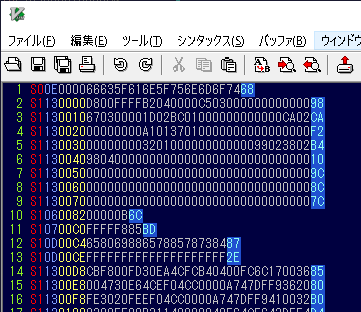
モトローラSレコードの表示
- こちらから srec.vim をD/Lし、vim74\vim74\syntax にCopy。
- こちらから srec.vim をD/Lし、vim74\vim74\ftplugin にCopy。
- vim74\vim74\filetype.vim に以下のエントリに、”*.mot” を追加。
" Moterola S record
au BufNewFile,BufRead *.s19,*.s28,*.s37,*.mot setf srec
- アドレスの少し色が薄いのでvim74\vim74\syntax\srec.vim を少し直す。左から3語句目がvim74\vim74\colors\選択しているColorマップ.vim 中の色付け部位名に対応しています。
HiLink S1Addr label
HiLink S2Addr label
HiLink S3Addr label
以下表示結果です。
日本語文字コードの確認と変換
文字コード確認は、
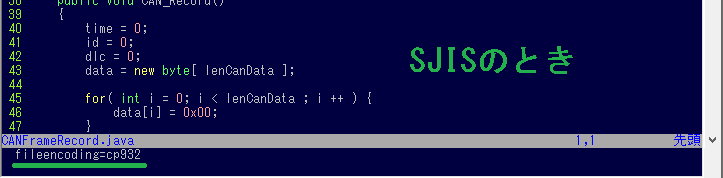
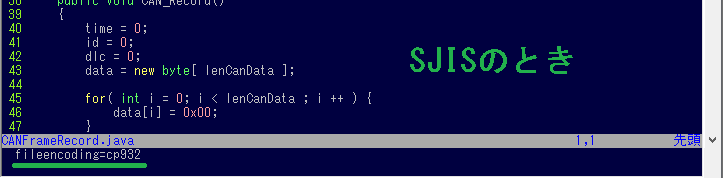
変換は、set fenc=shitf_jis もしくは set fenc=utf-8 。でも部分的に混在しているとうまくいかなかったような、、、