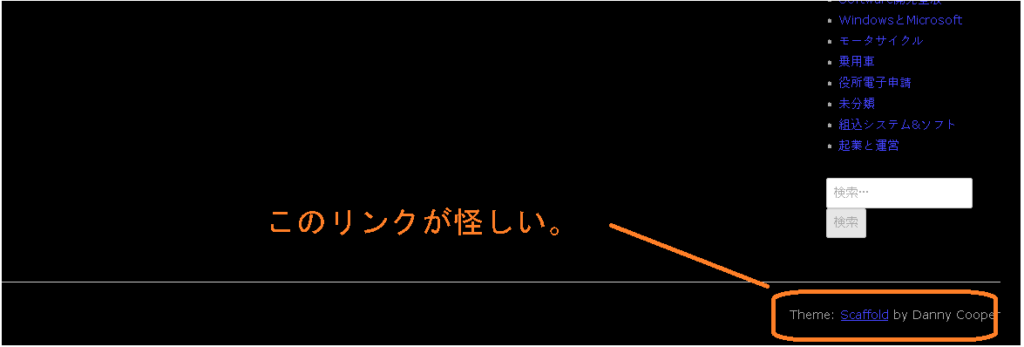
知人より弊方のブログにウイルスがいるとご指摘がありました。ブログの見える部分はブラウザ上に存在するので「ウイルスがいる」という表現は不適切だと考えますが、生成されたHTMLやページ上script、サーバサイドのscript に不適切なコードが含まれているので、「改ざんされている」という表現が正しいかと考えます。
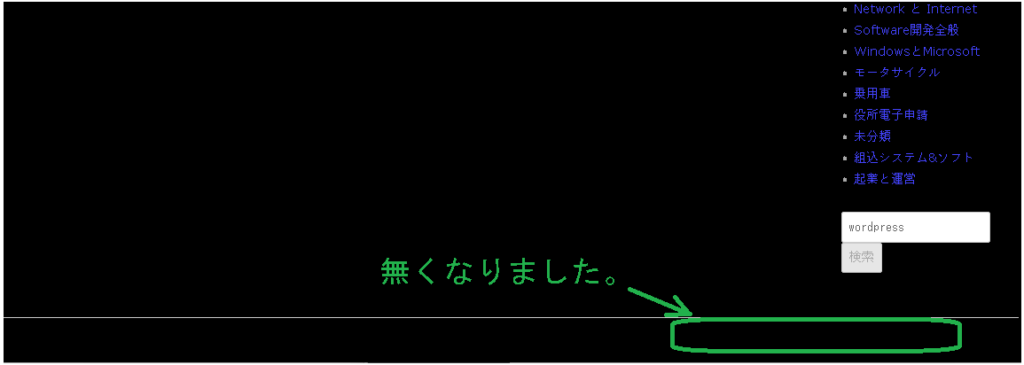
一か所怪しい点があり修正し、ブログ環境の見直しを行いましたが、知人に聞くと以下のような広告が表示され、クリックすると怪しい場所に飛ぶとのことでした。
- 続きへ進むにはこちらをクリック
- ドライバーの更新
弊方ブログでは、Googe Adsence (広告)を掲載しています。普段使っている Firefox では何故か広告表示されないので気づきが遅れました。
生成される HTML から「続きへ進むにはこちらをクリック」あたりを探します。Googleはあくまで広告の入り口で、CGIパラメタで広告主へのリンクを飛ばしているんですね。
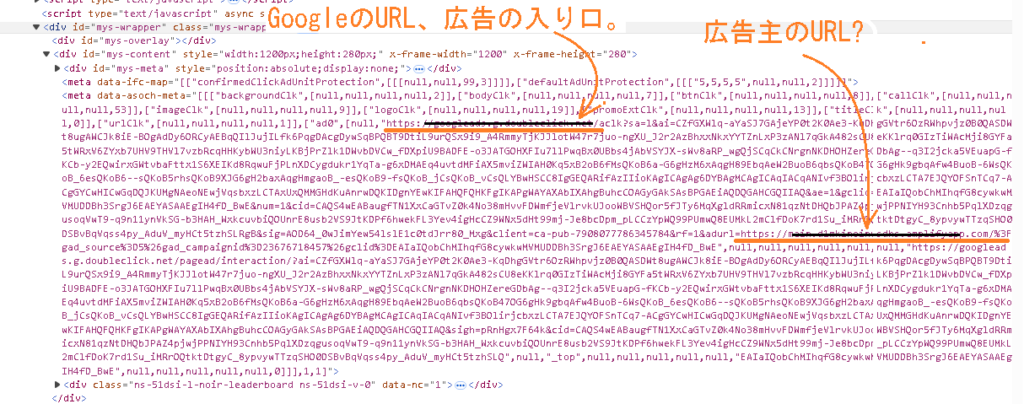
改ざんされたというより正常動作の範疇ですが、広告開始時にリンク側の内容が適切でも、後から内容が変更されるとこのような事態になってしまいそうですね。
対策は、Googe Adsence で広告単位で表示しないようにブロック設定ができるらしいです。

一瞬消えますが、直ぐ似たような別の項目が表示され、実質元に戻ってしまいます。
ここから不適切な広告の報告は、広告の(!)マークからできるみたいです。

プラグイン: Real-Time Find and Replace で、ドメインを動的に置換しようと思いましたが、Inner Htmlになっているので無理みたいです。
あとは Google 側で広告の精査にゆだねるしかなさそうです。
もしくは広告内容もGoogle側に置いて変更させないようにするか。。。