.msi( Microsoft Installer ) の実行を制限しない設定です。新しくWindowsをインストールした場合の設定方法の覚書です。
(多分)Win11の場合:


Win10の場合:

HowTo 備忘 アイデア 活動などを書いてます
.msi( Microsoft Installer ) の実行を制限しない設定です。新しくWindowsをインストールした場合の設定方法の覚書です。
(多分)Win11の場合:
Win10の場合:
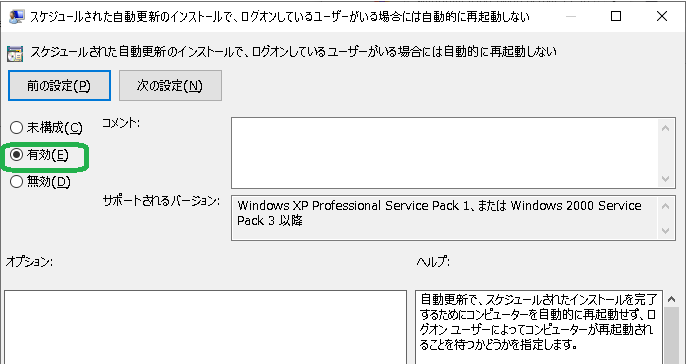
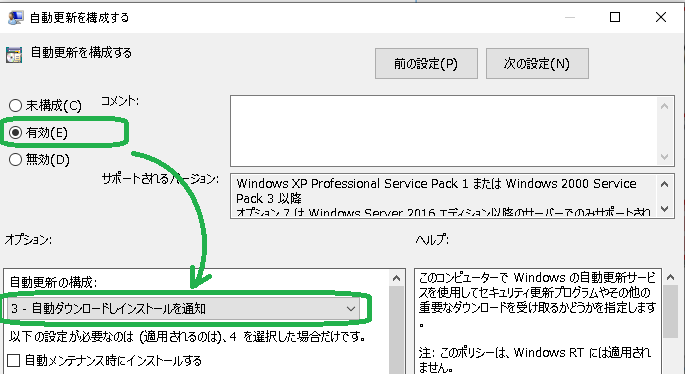
新しくWindowsをインストールした場合の設定方法の覚書です。ディスクトップ機ではよいのですが、ノートでストレージパスワードを掛けている場合、ノートを閉じていても、そのパスワード待ちで電源が入りっぱなしになります。そこで予期せずバッテリーが消費され、いざというとき駆動時間が減ってしまいます。
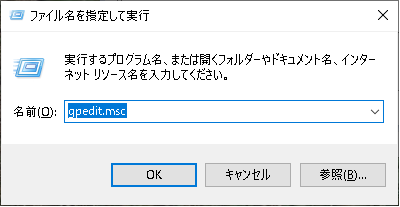
ローカルグループボリシーエディタを以下のように開きます、こらはローカルセキュリティボリシーとは異なりコントロールパネルから開くルートは無いようです。
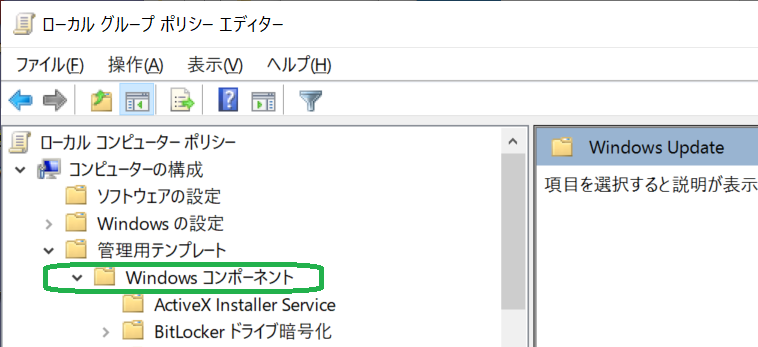
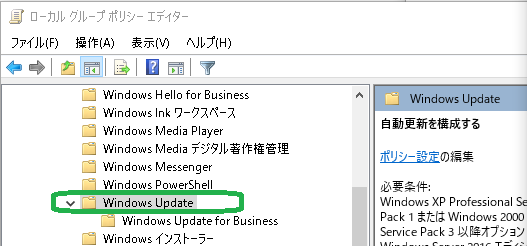
以下のようにツリーを開きます。

設定するポリシーは以下のとおりです。
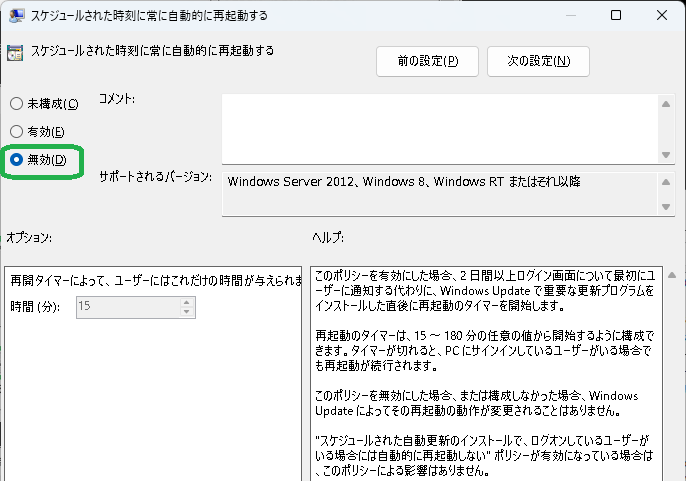
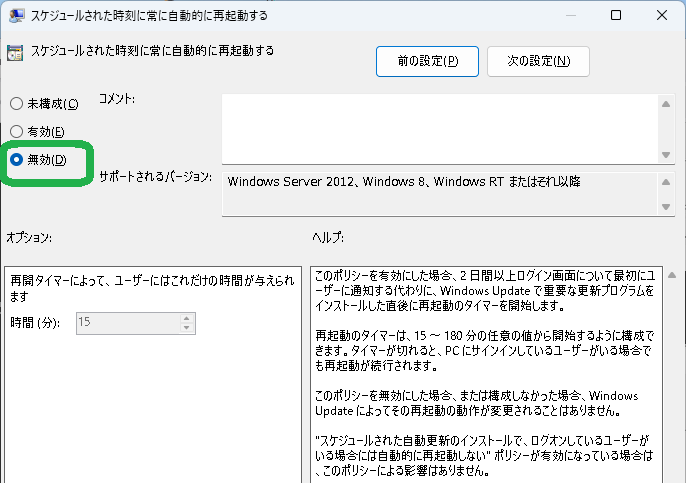
一緒に以下の設定もした方がいいようです。

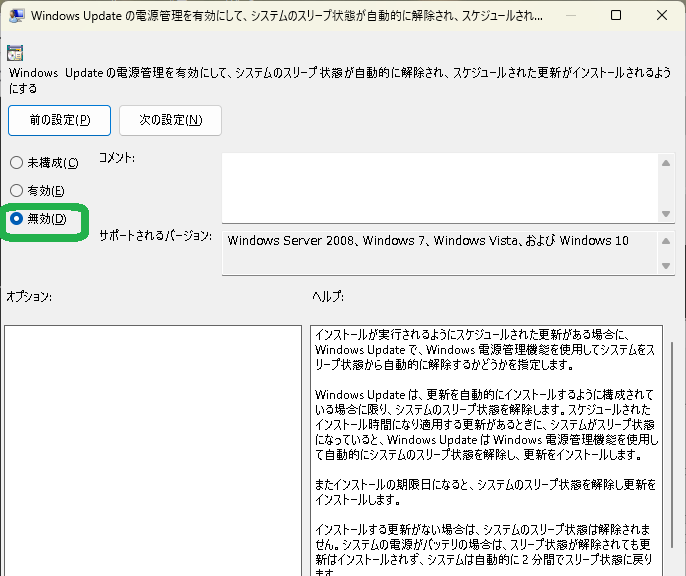
あとねんのため以下も実施しておきました。効果はよく理解していません。
弊方ブログは内容によっては、WEB検索1ページ目に出たりしますが、会社本体ページは全然です。そこでWordPressのヘッダに会社メインページのリンクを追加します。
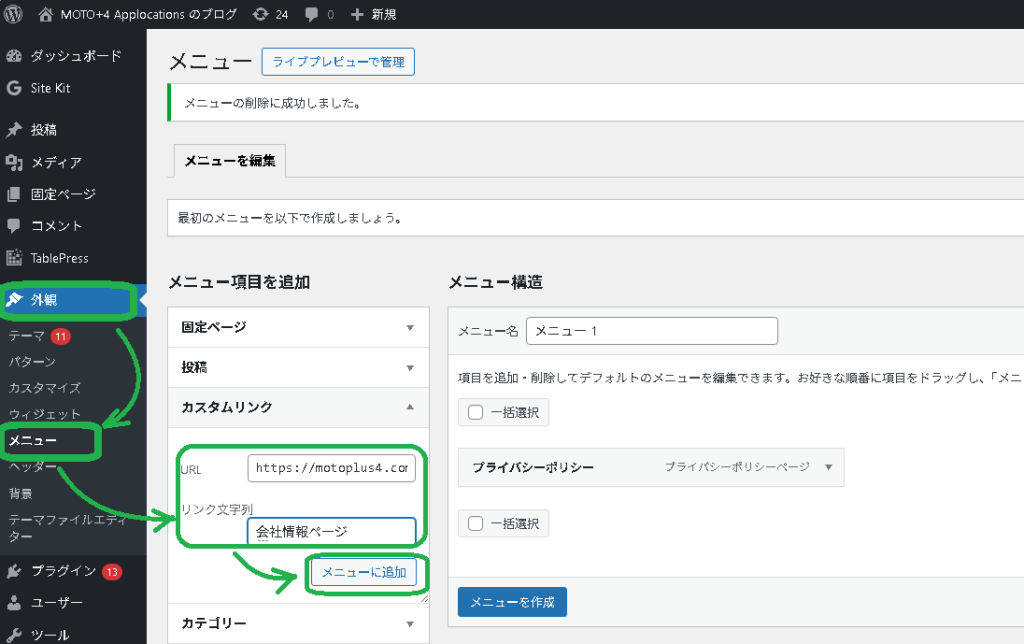
まず 外観 -> メニュー を開きます。カスタムリンク を開いて、URLとリンク文字を入力し、メニューに追加を押します。
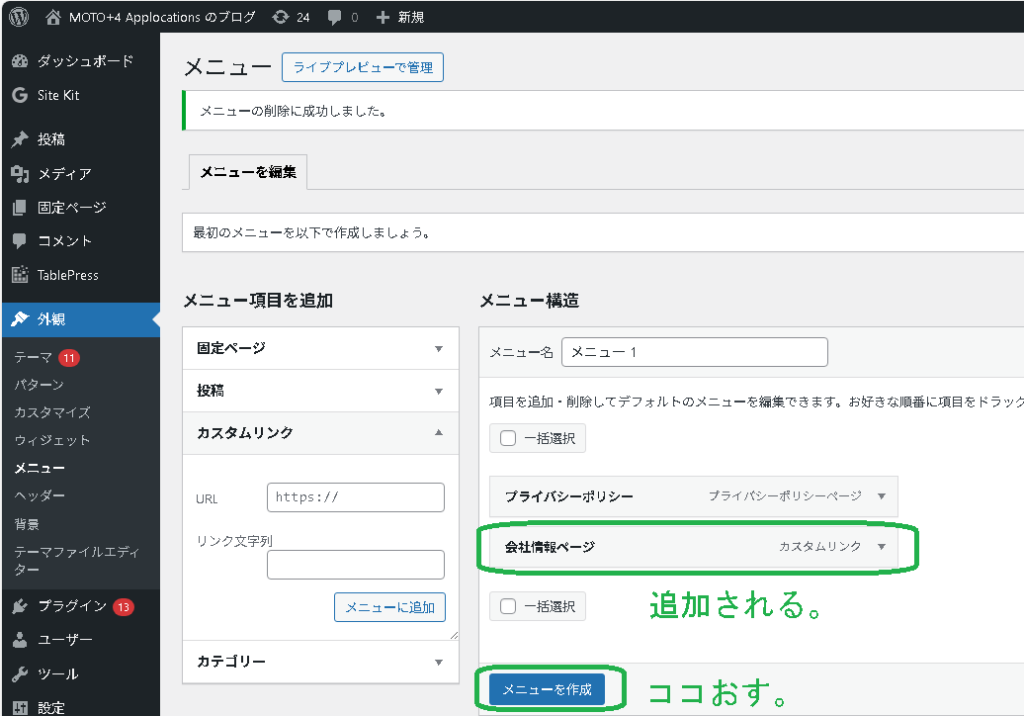
メニュー構造にリンクが追加されます。保存するには メニューを作成 を押します。
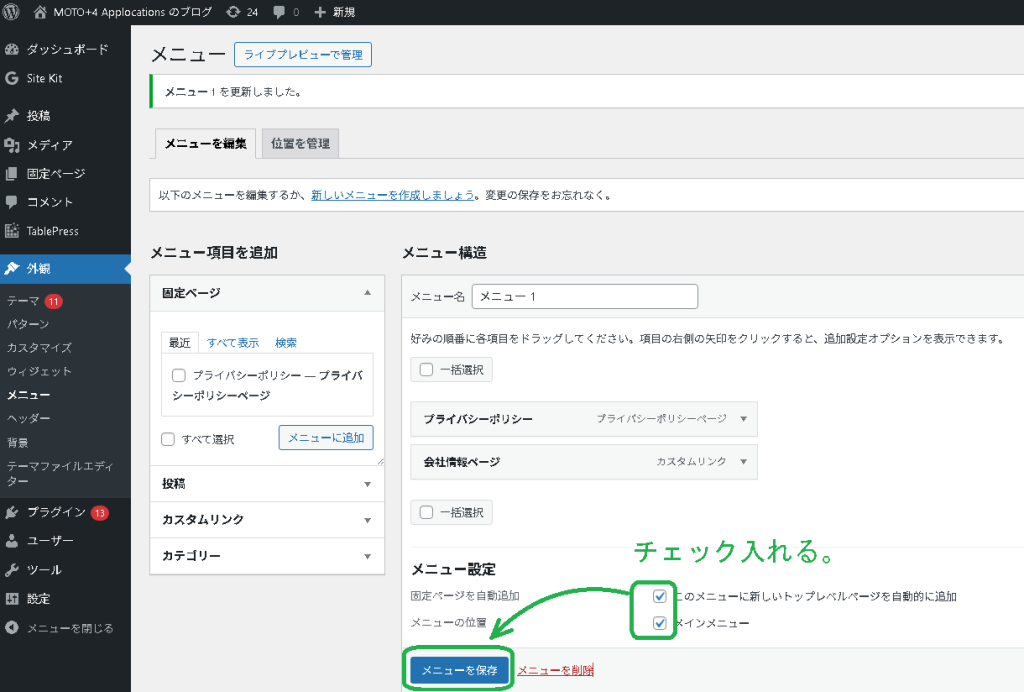
メニューを保存 が現れるので、チェックボタンにチェックを入れて押します。
追加結果は以下のとおりです。

弊方Windowsでは タスクマネージャ は使用せず SysinternalsSuite の Process Explorer を使用しています。一応Microsoft製、軽くて、タスクバーにも表示できるので重宝します。そのセットアップ方法の覚書です。
Process Explorer のインストール
procexp64.exe( 32bitなら procexp.exe )を任意のローカルパスにコピーします。
スタートアップに登録
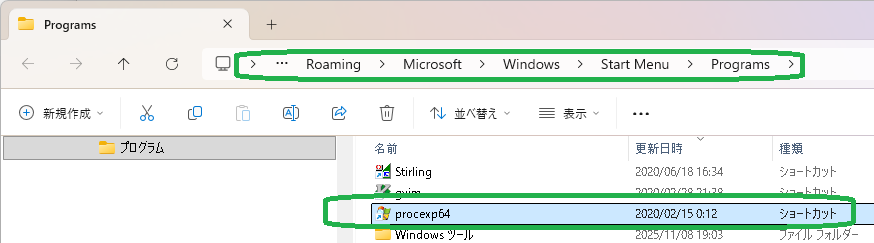
以下の場所にショートカットを作成します。
Process Explorer の設定
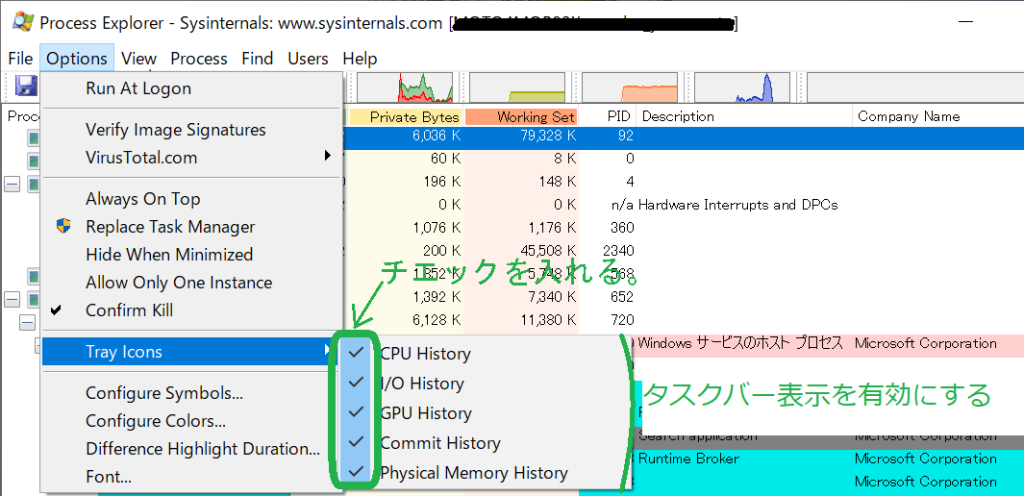
タスクバーアイコンを有効にします。
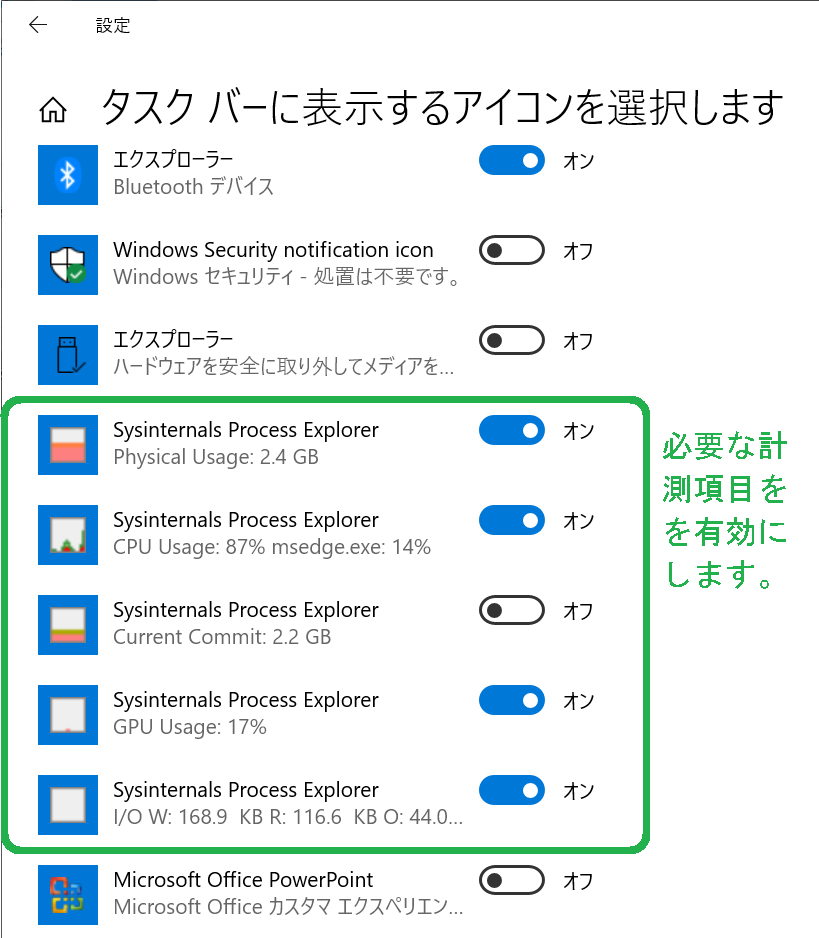
タスクバー側の設定
タスクバーの設定にアイコンが現れるので必要な項目を有効にします。
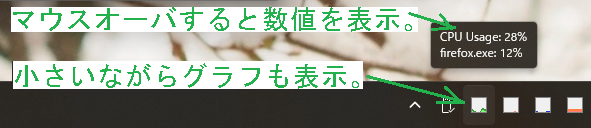
表示結果
表示結果は以下のとおりです。アイコンクリックすれば Process Explorer のUIが立ち上がりデバック中におかしくなったプロセスを素早く停止も可能です。
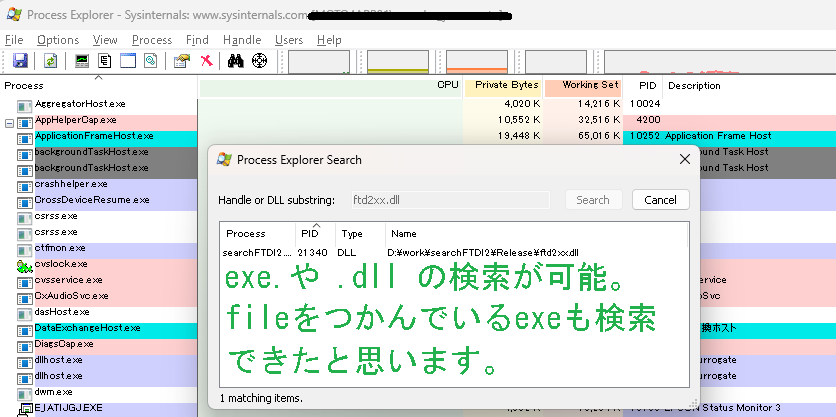
以下のような検索も可能です。
機械の業界で仕事をしている文書はなんでも Execl で作成されてしまいます。Word を使うと怒る方もいらっしゃいます。「文書はWordでしょ」という常識が通用しません。そこで Word 操作方法を忘れがちです。その覚書です。
表に連番を自動で振る
2003では以下のようにフィールドを使います。2024 でもおんなじかと。
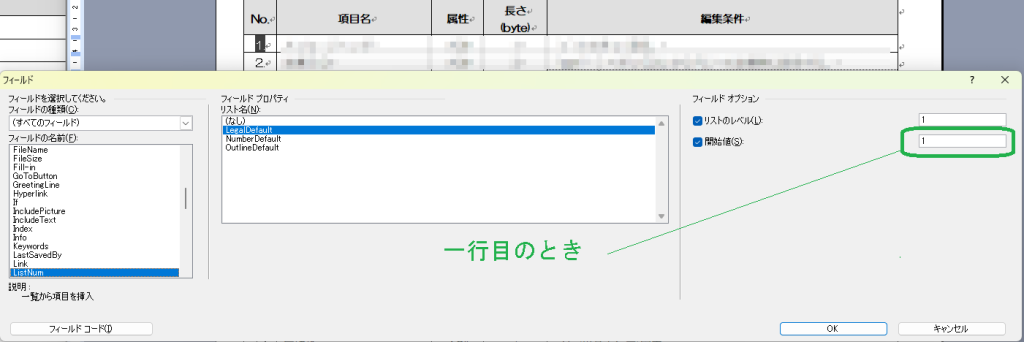
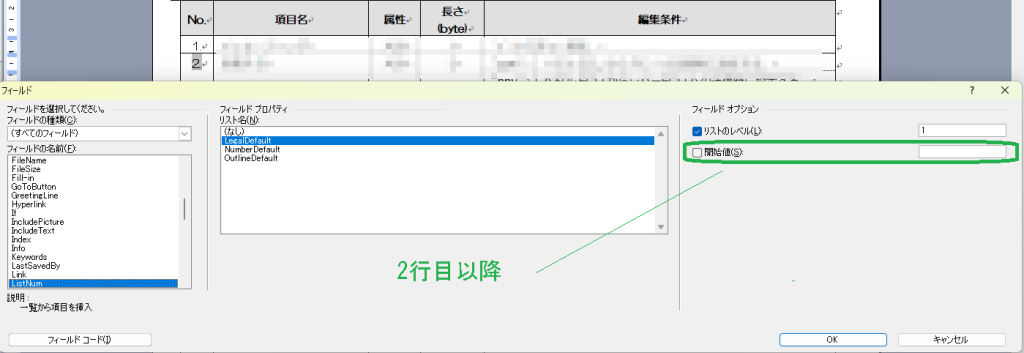
ちなみに AutoNum だけだと複数表があると文書内の連番になってしまいます。
表にページ毎にヘッダを自動挿入する
表が複数ページに跨る場合、ヘッダ(見出し)をページ毎に自動挿入するには以下の操作です。(図は2003ですが操作場所が違うだけで2024も同じでしょう) 表プロパティの「各ページにタイトル行を表示する」、ヘッダ以外の場合に以下メニューを操作しても無視されます。
