前記事では北斗電子さんHSBRH850F1KH176をターゲットにRH850自動コード生成をベースとし、RH850/U2A 用のCANドライバサンプルコードを、RH850F1KH用に基本部分を移植しました。次にCAN送信をテストしていきます。今回は企画元がFD未対応なので、CAN2.0のみの使用です。
テスト環境
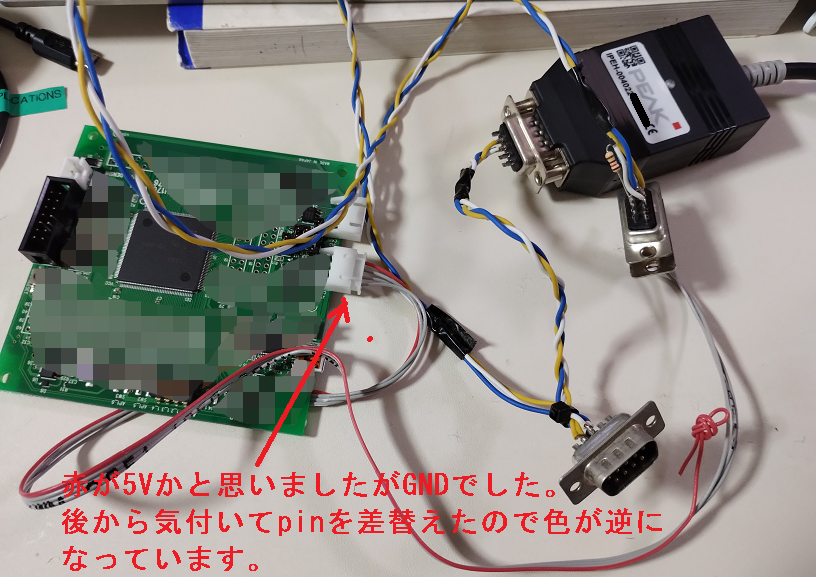
CAN受信側のハードは、PEAK CAN-USB FDバージョン を用います。代理店さんから購入予定でしたが、ebayで新品放出品があり入手しました。正規ルート以外はコピー品も多いようなので要注意です。ドイツから直接購入は出来ないようです。過去職場でCAN2.0版を導入しましたが、筐体が黒になり安っぽさが消えたように見えます。Kavaer PCeボートも保有していますが、今回、新しく試しています。
配線はpin1とpin4を逆にしないよう注意です。HSBRH850F1KH176 のCANコネクタはpin番号がシルクに書いないようです。JST製なのでpin番がハウジングに書いてあったと思いましたが見当たらず。付属のケーブルは線が細くはんだ付して直ぐ切れそうリスキーです。太い線で作り直した方がよさげです。CANも絶縁になっていないので回路検討としてはCANトランシーバから先は別で組んだ方が良いかも。
CAN受信側のソフトはオープンソースのBUSMATER を用います。CAN DBを定義でき、CANシグナルに分けてサンプリングとログができます。CANLayzer の CAN DB のコンバートも可。しかし数年間、UPDATEがありません。のでCAN-FDには未対応です。過去職場でも紹介し導入し、割と評判が良かったですが、世間的には知名度が低いのでしょうか? (リリース当時ETASさんもアピールしていましたが) にしてもKavaer CAN King ( 全然Kingじゃない )は使い物にならないと思うのですが…
Baudrateの設定
マニュアル 「表 24.125 通信速度の設定例」の表内の「(数値)」が、CANクロックの分周ですが、そのまま設定するとBUSエラーになります。通信速度の計算式をみると、そこから -1 が必要です。CANクロック:fCANが40MHz、1Mbpsの場合、r_rh850_can_cfg.c の設定は以下のようになります。Tq数( 1bitの分解能、通信相手によっては調整要す )は取急ぎ粗目に 8 としています。
const can_ch_cfg_t g_can_ch_cfg[ USED_UNIT_NUM ][ MAX_CH_NUM_U0 ] = {
// ========================== U n i t 0 設 定 ==========================
{
// ------------------------ C h 0 設 定 ---------------------------
{
・・・中略・・・
/* ---- Normal Baudrate ----
パラメータ( 分周比, SEG1 Bit-Timing, SEG2 Bit-Timing, Jump幅)
*/
CAN_CFG_N_BAUDRATE(
// 1Mbps 分周比 = 40Mhz ÷ ( 1MHz × Tq数:8 ) = 5 より-1
4U, CAN_NTSEG1_5TQ, CAN_NTSEG2_2TQ, CAN_NSJW_1TQ
),
/* ---- Data Baudrate ---- */
CAN_CFG_D_BAUDRATE(
// 1Mbps 分周比 = 40Mhz ÷ ( 1MHz × Tq数:8 ) = 5 より-1
// 取急ぎCAN2.0では Normal Baudrate と同じでよい模様。
4U, CAN_NTSEG1_5TQ, CAN_NTSEG2_2TQ, CAN_NSJW_1TQ
),設定値まとめを以下に示します。なお一般的に乗用車両は500kbps、働く車やレクレーションVehicleは250kbpsですが、レースや車両評価で使う場合は1Mbpsが多いようです。
| 項目 | 値 |
| 通信速度 | 1Mbps |
| fCAN クロック | 40Mz |
| クロック分周 | 5 |
| Tq数 | 8 |
| SEG1 Bit Timing | 5 |
| SEG2 Bit Timing | 2 |
| Bitズ レジャンプ幅 | 1 |
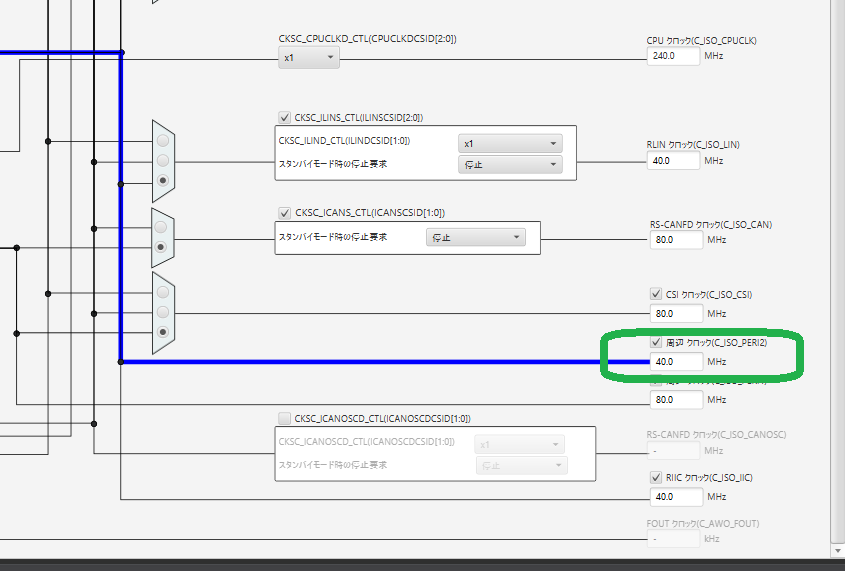
CANクロック::fCANは、設定にもよりますが下図の部分でよいようです。
CAN Frame送信
RH850では送信は3つの方法があります。その中で送信Buffer が一番シンプルな手段です。使用する APIは R_CAN_TransmitByTxBuf (orgは略しすぎなので改名してます) です。送信Buffer 数は以下のようになっています。
| 項目 | 数 |
| 1 Channelあたり送信Buffer数 | 32 |
| 1 Unitあたり送信Buffer SFR数 | 255 |
CAN Channel と 送信Buffer の割当てがイマイチ分かりにくいです。単純に 「 Channel番号 × 36 + CH毎に使うBuffer番号」 でいいようです。OrignalのAPIは 送信Buffer 番号は絶対値なので、ch毎の相対にした方が使いやすいでしよう。以下コードを追加しました。
#define CAN_CH_TO_TX_BUF( ch, num ) ( ch * MAX_TX_BUF_OF_CH + num )
・・・中略・・・
// 送信Buffer番号を算出
txbuf_idx = CAN_CH_TO_TX_BUF( ch_idx, txbuf_idx )以下呼出しコード例です。基板確認のため、Ch 0、Ch 1両方試します。
Can_RtnType ret;
can_frame_t frame;
frame.ID = 0x700;
frame.DLC = 8;
frame.IDE = 0; // 標準frame
frame.TMFDF = 0; // CAN2.0
frame.RTR = 0;
frame.DB[ 0 ] = 0x30;
frame.DB[ 1 ] = 0x31;
frame.DB[ 2 ] = 0x32;
frame.DB[ 3 ] = 0x33;
frame.DB[ 4 ] = 0x34;
frame.DB[ 5 ] = 0x35;
frame.DB[ 6 ] = 0x36;
frame.DB[ 7 ] = 0x37;
ret = R_CAN_TransmitByTxBuf( 0, // i : CAN Unit
0, // i : CAN Ch番号
0, // i : 送信Bfffer番号
&frame // i : CAN Frame
);
frame.ID = 0x701;
frame.DLC = 8;
frame.IDE = 0; // 標準frame
frame.TMFDF = 0; // CAN2.0
frame.RTR = 0;
frame.DB[ 0 ] = 0x40;
frame.DB[ 1 ] = 0x41;
frame.DB[ 2 ] = 0x42;
frame.DB[ 3 ] = 0x43;
frame.DB[ 4 ] = 0x44;
frame.DB[ 5 ] = 0x45;
frame.DB[ 6 ] = 0x46;
frame.DB[ 7 ] = 0x47;
ret = R_CAN_TransmitByTxBuf( 0, // i : CAN Unit
1, // i : CAN Ch番号
0, // i : 送信Bfffer番号
&frame // i : CAN Frame
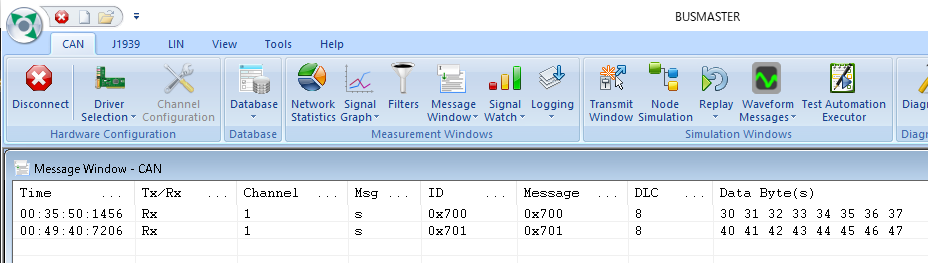
);BUSMASTERでの受信結果は以下のとおりです。送信できない場合、あまり不確定要素はないため、配線ミスかBaudrate間違いの可能性が高いです。
なお送信前に、送信中かエラー中かの判定もないので追加したほうがいいでしょう。API: R_CAN_CheckTxBufResult でも代用できるかもしれません。
{
volatile uint32_t sts;
sts = RCFDCnCFDCmSTS( ch_idx );
if ( ( sts & CAN_COM_STS_BIT_ON ) == 0) { // Ch通信可=不可
return CAN_RTN_TX_ERROR ;
}
if ( ( sts & CAN_BUSOFF_STS_BIT_ON ) != 0) { // Ch BUS-OFF
return CAN_RTN_TX_ERROR ;
}
if ( ( sts & CAN_TRM_STS_BIT_ON ) != 0) { // Ch送信STATUS=送信中
return CAN_RTN_TX_ERROR ;
}
}送信割込み検出
送信完了割込みは、エラー割込みや送信前のSFRチェックを行えば特に不要です。割込が多発すると、組込みでは貴重な処理能力を食います。今のところは余裕があるため検出しておきました。弊方での実装例は以下のとおりです。実装先は自動コード生成された r_smc_intprg. c です。
/* CAN0 TRANSMIT INTERRUPT */
#if defined (__CCRH__)
#pragma interrupt IntCAN0Tx(enable=false, channel=26, fpu=true, callt=false)
#elif defined (__ghs__)
#pragma ghs interrupt
#elif defined (__ICCRH850__)
#pragma type_attribute=__interrupt
#else
#error Unknown Compiler
#endif
void IntCAN0Tx(void)
{
/* Start user code for IntCAN0Tx. Do not edit comment generated here */
R_CAN_DispatchEevent( 0 /*unit*/, 0 /* ch.*/, CAN_EVENT_SEND_COMPLATE );
/* End user code. Do not edit comment generated here */
}弊方では上記の R_CAN_DispatchEevent の中で、登録ずみcallbackを呼んでいます。例がなくとも想像がつくでしょう。r_rh850_can_cfg.c の設定も少し変更します。以下の 0xFFFFU の部分、送信Buffer の32個に対して1bitづつ有効無効を指定します。取急ぎ全部有効にしておきます。
const can_ch_cfg_t g_can_ch_cfg[ USED_UNIT_NUM ][ MAX_CH_NUM_U0 ] = {
// ========================== U n i t 0 設 定 ==========================
{
// ------------------------ C h 0 設 定 ---------------------------
{
・・・中略・・・
/* ---- Tx/Rx FIFO buffer ---- */
0x00000000UL,
0x00000000UL,
0x00000000UL,
/* ---- Tx queue ---- */
0x00000000UL,
/* ---- 送信Buffer割込許可 RCFDCnCFDTMIECm ---- */
0xFFFFU // LSBより 1bit 1Buffer で割当て
}割込みが発生しない、割込みが発生後、RESETする場合は、割込み設定が正しくできていない可能性が高いです。前記事をよく確認します。
おまけ: デバッグで助かったe2Studioの機能
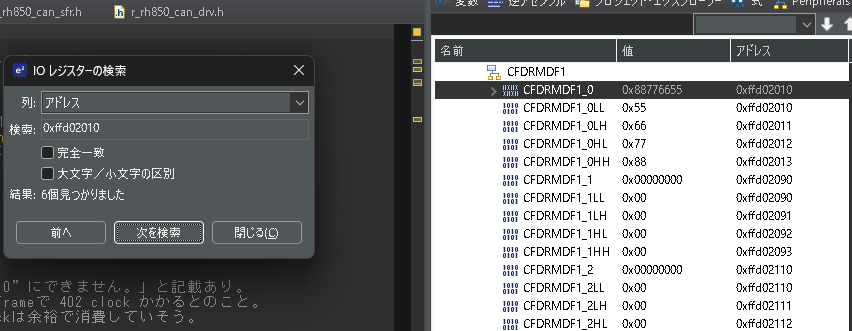
SFRは多すぎてウオッチするのに時間がかかります。CS+ にもあるかもしりませんが、e2Studioでとても役に立った機能を記録しておきます。
① 選択されたレジスターを使うと、確認したいSFR値だけをまとめておける。
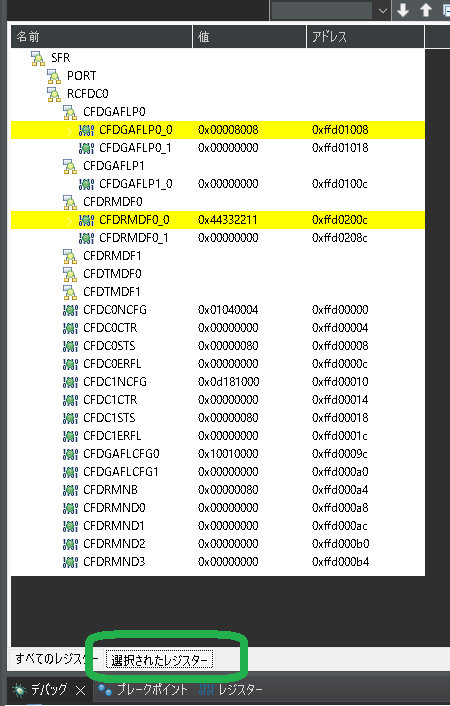
② 上記①の抽出のため、SFR一覧の目視検索に時間がかがる。SFRiodefine.hの定義名なので、マニュアル記載名が検索キーにならないところ、アドレスでも検索できる。