構想時のメモです。
コンセプト
ラズパイ や FA用PC と 汎用CANボート の組合せがスピーディですが、
- 起動に時間がかかる。
- サイズが大きくなりがち。(二輪にも載せたい)
- 細かな制御ができない。
- 予期しない不確定要素がおおい。
- ノイズや振動は大丈夫か? (二輪にも載せたい)
- CAN-FDに対応させたい。(開発用途ではCAN-BUS使用率が直ぐいっぱいになってしまう)
よって車載用のCAN付マイコンを使います。
モニタリング
ロガーでもリアルタイム値をリモートで見たいと要素もあります。モバイル端末で中継させ、用途に応じてデータを飛ばします。以下のような構成とします。

ロガー部構成
モバイル端末に使うには、BTで中継します。

以下ポイントです。
- BT4は遅いのでBT5.1を使います。Long rangeモードがあり耐ノイズ性を期待します。
- 車載CANとBTを搭載したマイコンはほぼないので、タスク分割も兼ねて別マイコンとします。
- ログモードは後でかんがえます。
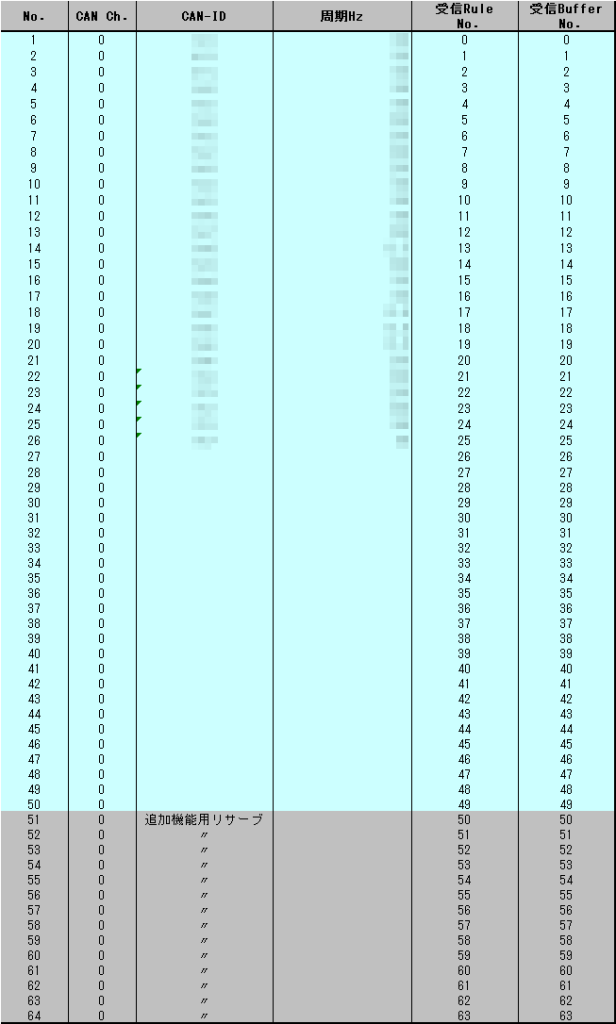
CAN受信設定
極力ハードウェア機能で受信させ、フルログモードに備え、処理能力の消費を控えます。CANは2チャンネルを使用。制御用が必要になる可能性もあるため、それら用に受信バッファとルールをRESERVEしておく。
基本はこんな感じで構想中です。