過去にXperia Z4 Tablet国内LTE版(SO-05G), Xperia Z4 Tablet海外LTE版SGP771を、Android11相当にUPDATEしました。今回 Xperia Z4 Tablet Wi-FI版SGP712 を実施しました。その手順の違い等を報告します。
Bootlooder Unlock
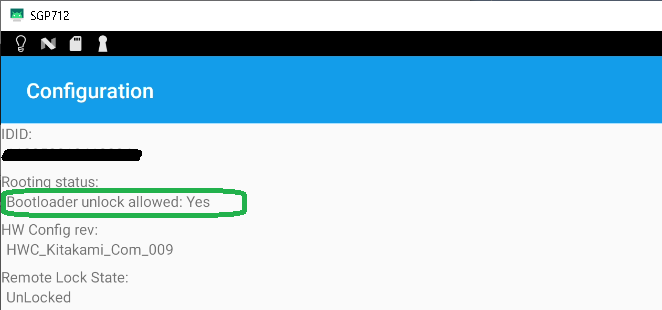
手順は SO-05G と同じです。SONY Unlock Bootloader サイトで選択するDevice名はLTE版もWi-Fi版も共通でした。ポイントとなる Bootloader unlock allowed の状態は以下のとおりでした。
なお、解除コードが合っているにもかかわらずUnlockができない場合が見られました。その対応はこちらの別記事を参照してください。
カスタムリカバリ
LTE版とは別の物を使います。”karin_windy” は Z4 Tablet Wi-FI版のコードネームです。
| file | 補足 |
| TWRP-3.1.1-lineageos-karin_windy-20170520.img | 機種判定がうまくいかない |
| TWRP-3.5.0_9-0-karin_windy-20210122.img | 状況によっては使えない。 |
一旦は、TWRP-3.5.0_9 でOS書込みだけ行けはしました。boot.img の書換は不要でした。

OS
以下2種類を試しました。それぞれ難点がありました。
| file | 備考 |
| lineage-18.1-20230205-UNOFFICIAL-karin_windy.zip | Android11相当 |
| lineage-19.1-20241030-UNOFFICIAL-karin_windy.zip | Android12相当 |
Lineage-19.1(Amdroid12相当)
今回改めてカスタムROMを探索すると、LinageOS21( Android14相当 )まで出回っていることが分かりました。LinageOS20用、LinageOS21用は機能制限があるようです。詳しくは XDA Forum で検索してみてください。しかし公開先がロシアでした。国事情とソフトウェア事情はことなるとは思いますが、なぜ一般的な公開先 Github、Goolgeドライブ、Android File Host (ここは有償ですか)、SOURCEFORGE ではないのか不安がよぎります。
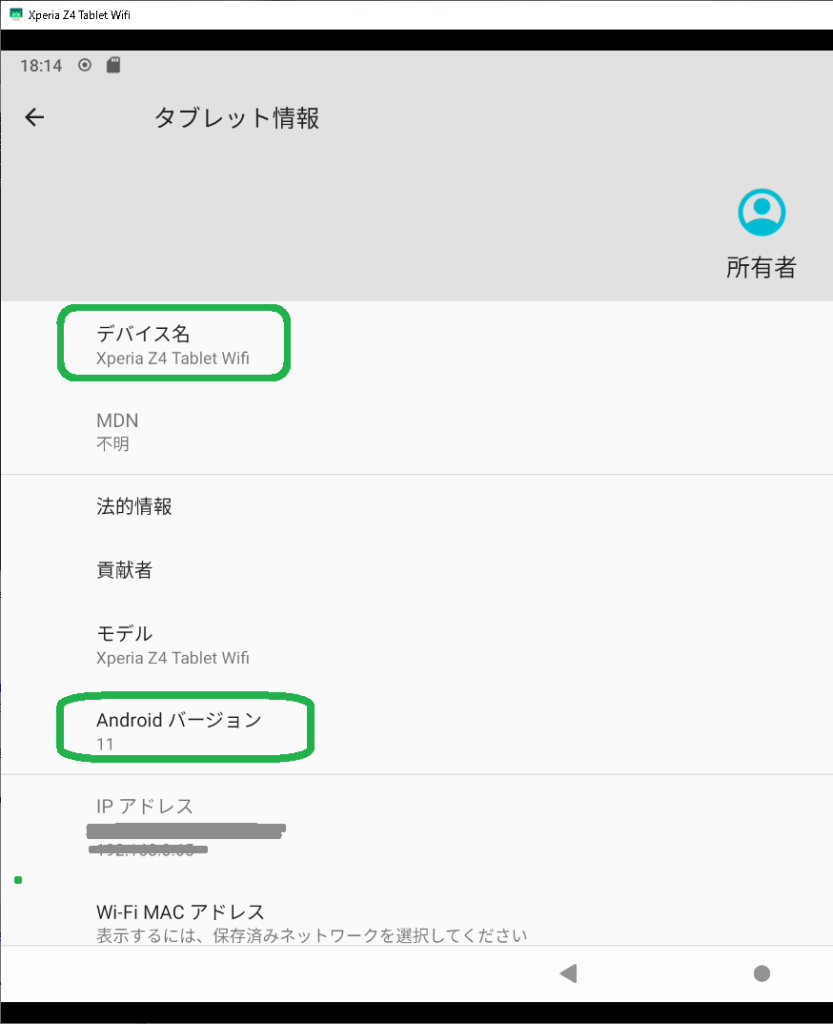
OS自体は書込み、起動共に正常でした。Wi-Fi、GPS、Bluetooth、カメラ、SDカードの正常確認できました。

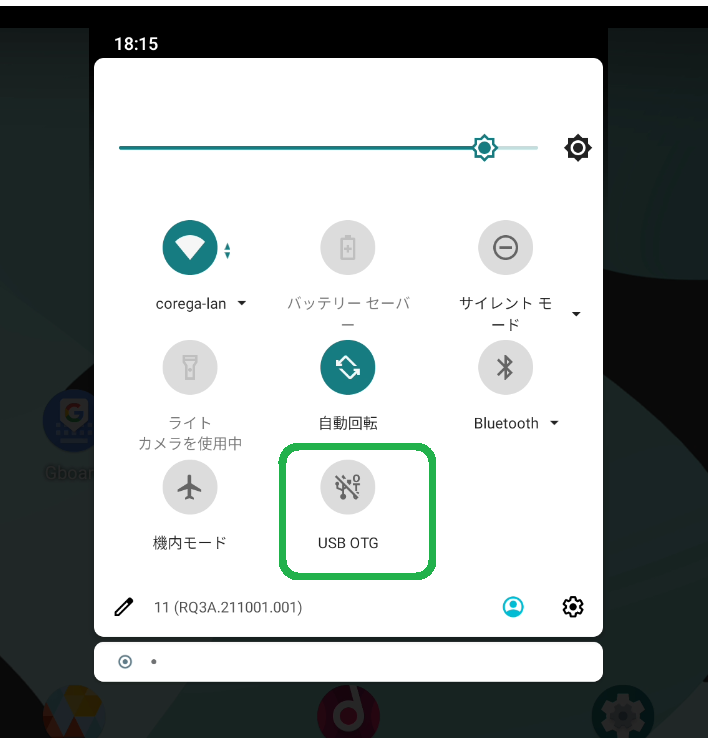
すこし変なのが、USB OTG (外部USBメモリの使用) でした。弊方はAndroidに本機能があることさえ知らなかったのですが、本機能の動作を重視している方もいらっしゃるようです。 Wi-Fi版のLinageOS18では通常コントロールパネルに表示されるのですが、今回は表示されません。検索すると出てはくるのですが、、、実際にUSBメモリを差しても表示は出てきませんてした。

Lineage-18.1(Amdroid11相当)
LinageOS19は、USB OTGの件と他で万が一問題があるとマズイので今回は適用は控え、利用実績の高いLinageOS18に入れ直します。ここで問題が発生です。
問題1: TWRP-3.5.0_9 が起動しない
LinageOS19 で何かが変えられてしまったのかもしれません。一旦純正ROMに戻してみたのですが解消しませんでした。TWRP-3.1.1-lineageos-karin_windy-20170520.img に書直しすと起動しました。こちらで作業を進めるしかなさそうです。
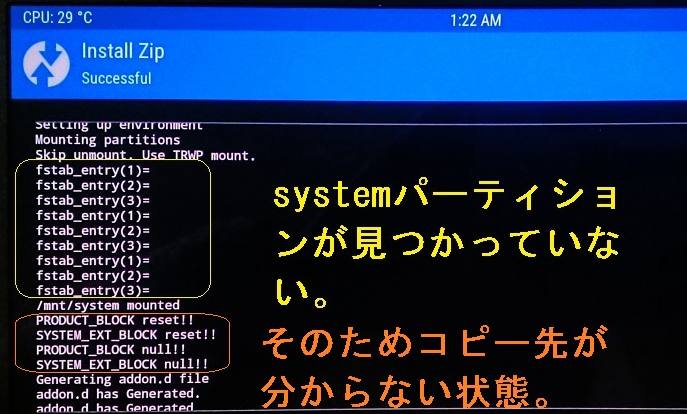
問題2: TWRP-3.1.1 でOS書込みでエラーが発生
どうも機種認識がうまくいっていないようです。これはTWRPのバージョンによるようです。(SGP611でも同様の事象が見られました)

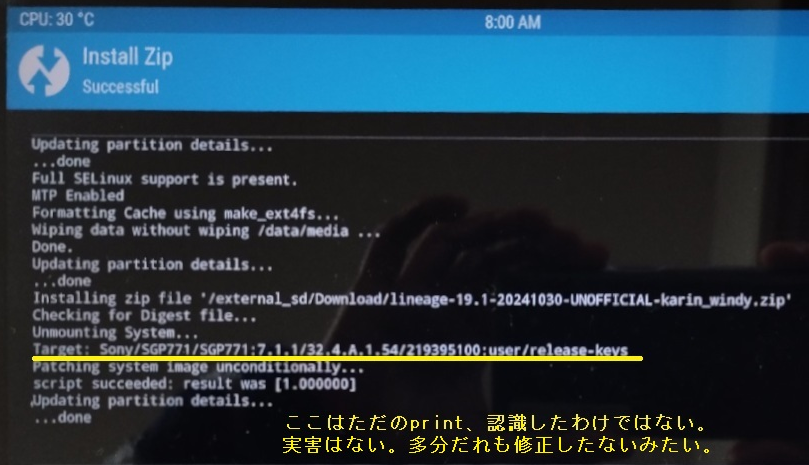
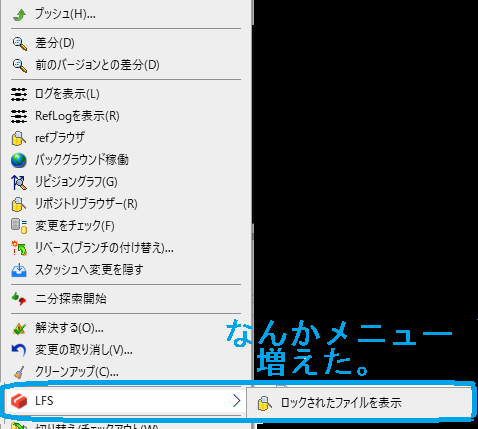
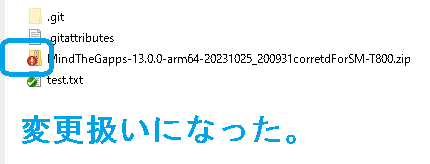
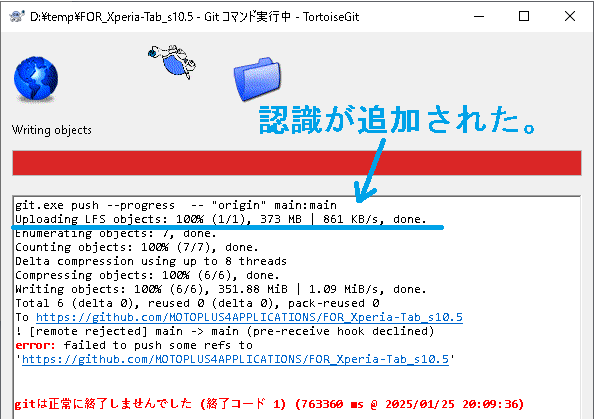
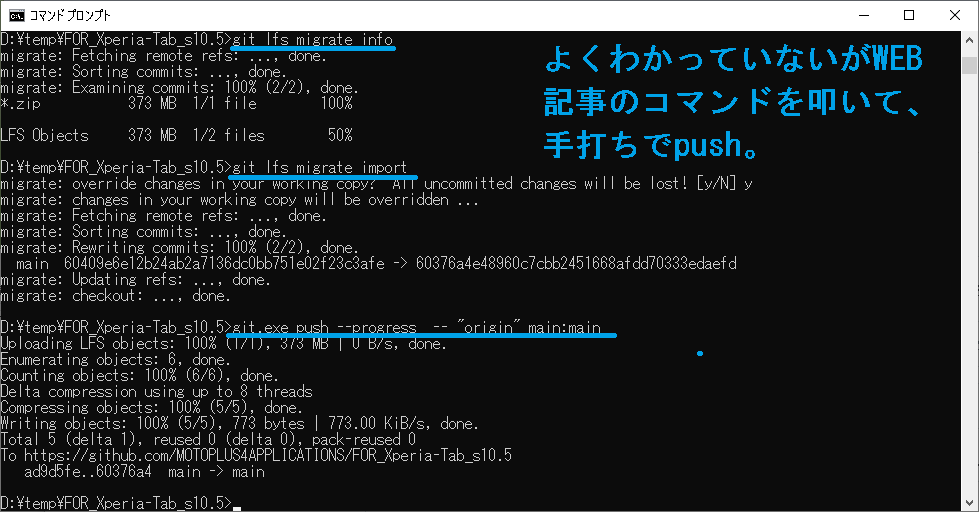
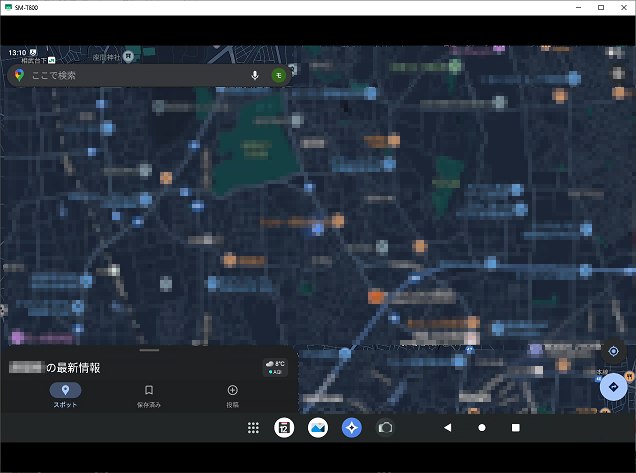
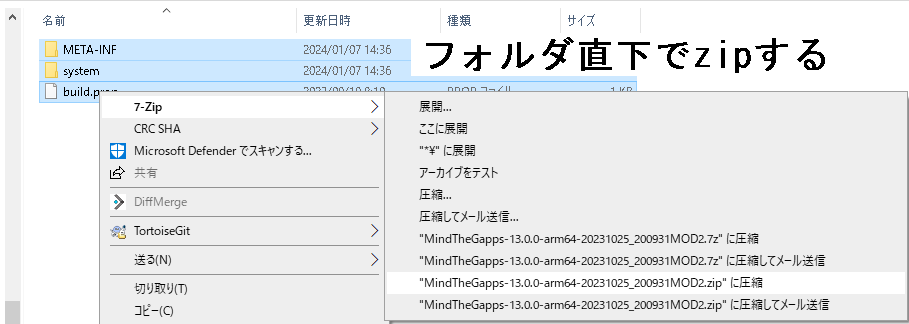
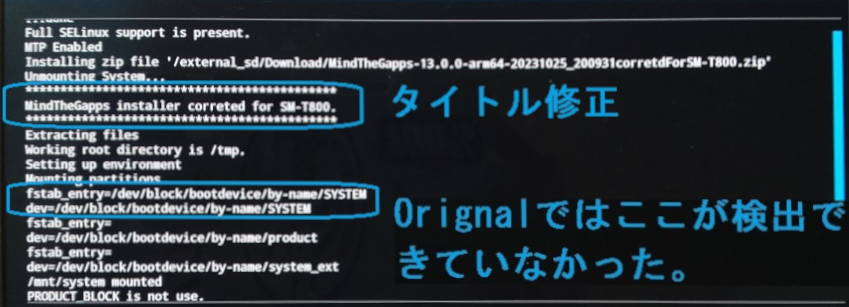
仕方ないのでOSインストールスクリプトの機種チェックを外してインストールします。詳しい手順は割愛しますが以下画像を見てください。
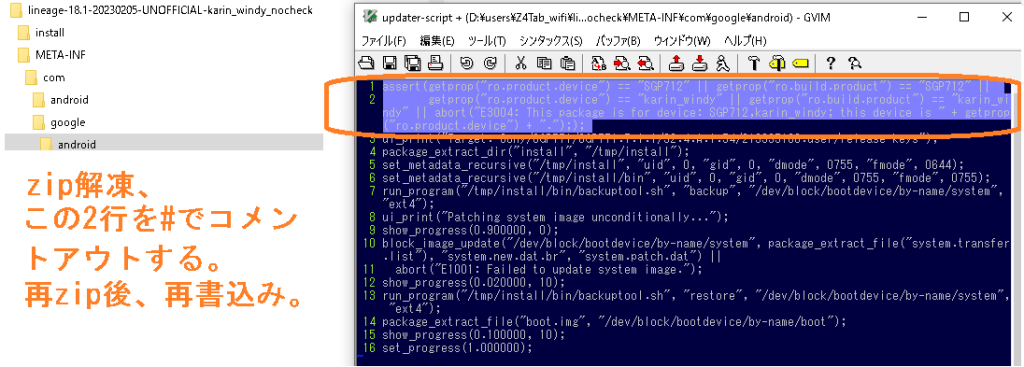
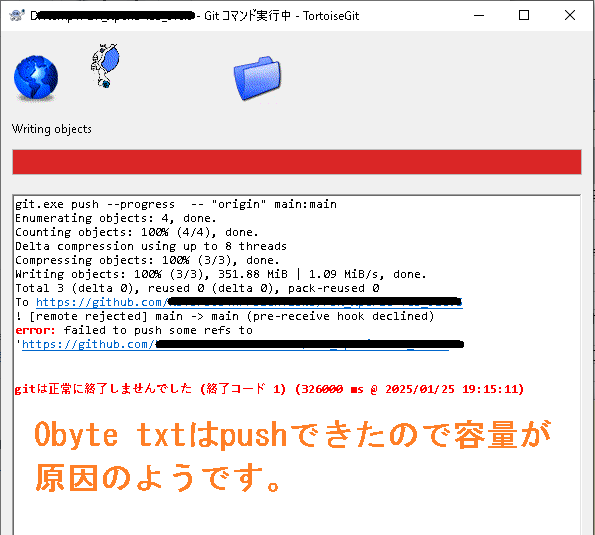
zipは本流にマージするのは恐れ多いため、こちらに個別に公開しています。
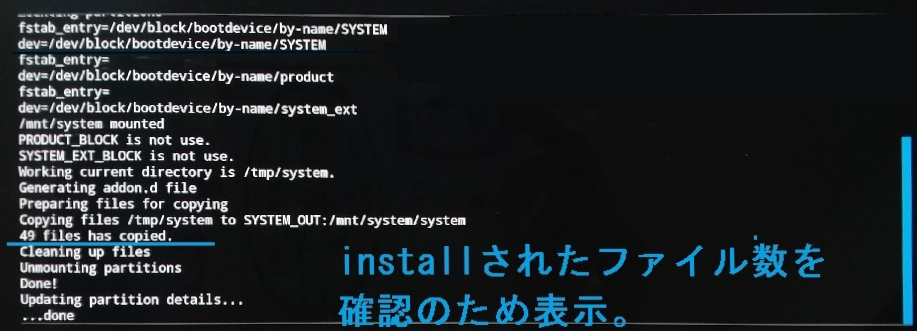
これでようやくOS書込みできました。Wi-FI、GPS、Bluetooth、カメラ、SDカードはOK。USG-OTGも表示され、USBメモリ接続まで確認できました。
Googleサービス
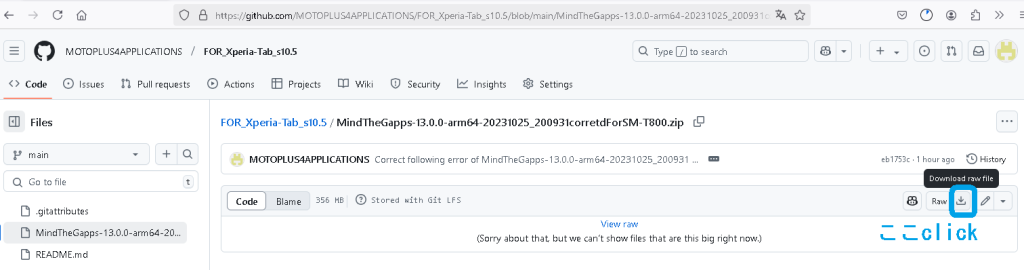
以下のMindTheGapp を、TWRPでインストールします。SGP612、SGP771、SM-T800とは異なり、Google Play 開発者サービス と Google Play の個別インストールは不要でした。
| file | 備考 |
| MindTheGapps-11.0.0-arm64-20230922_081122.zip | Google検索、Google Play 開発者サービス、Google Play の3つ |
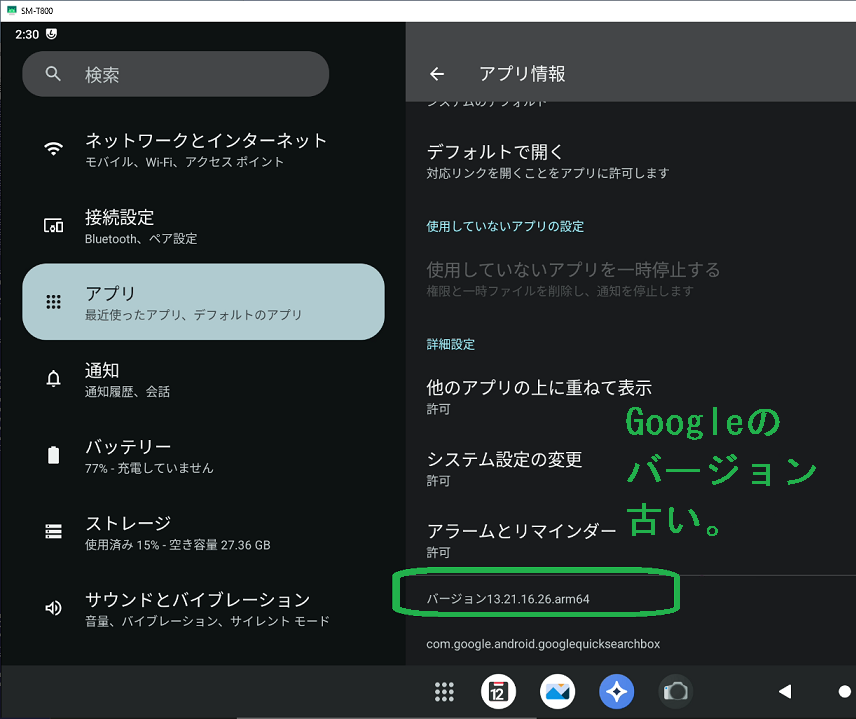
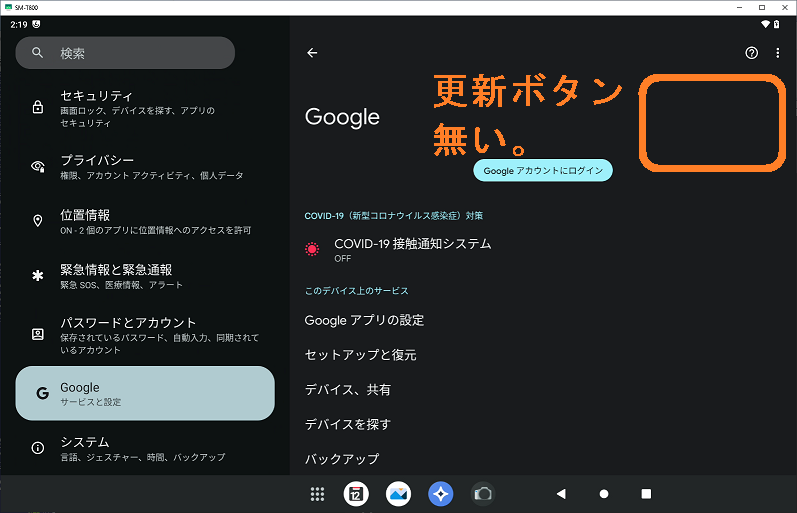
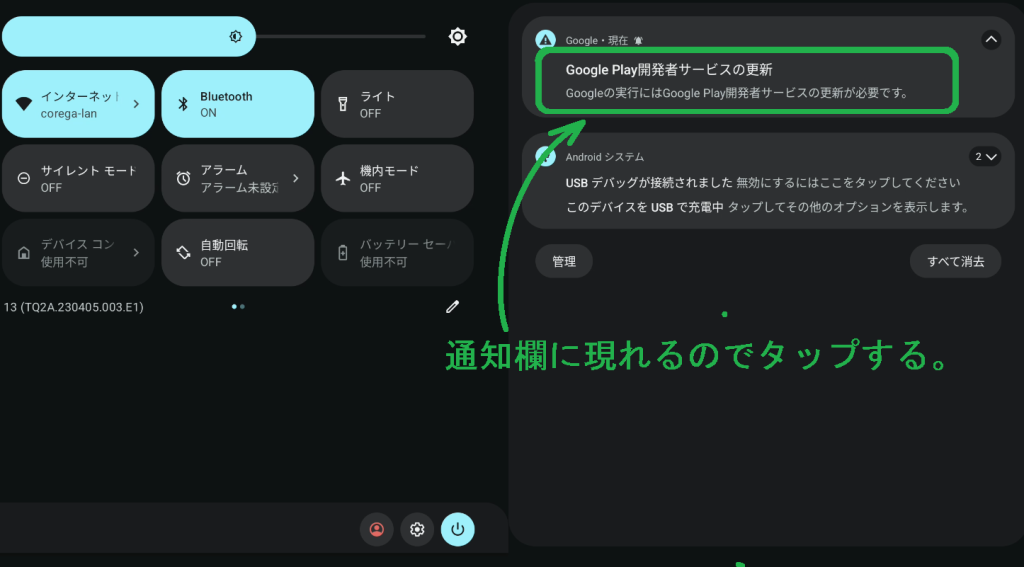
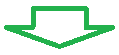
インストール後、GoogleサービスをUPDATEします。ポイントは以下2点です。
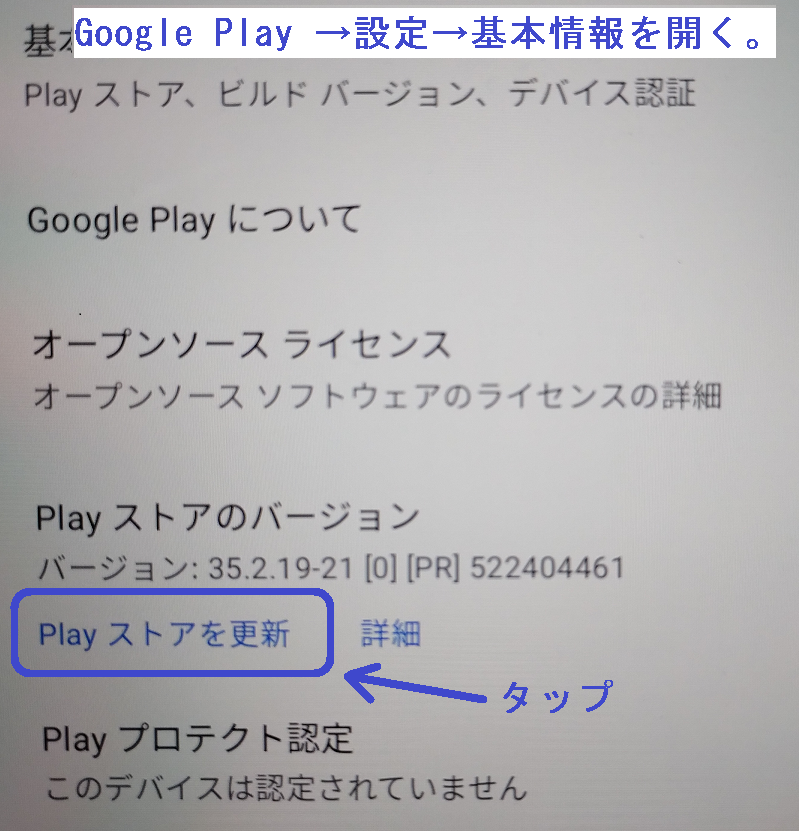
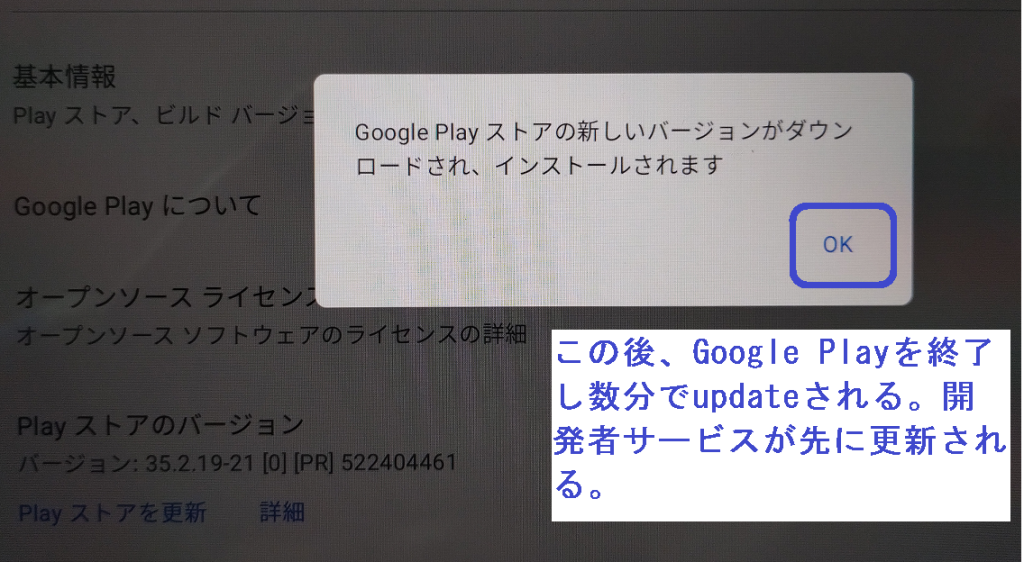
‘25.1月時点でのGoogleサービスのバージョンは以下のようになりました。
| アプリ名 | update前 | update後 |
| Google検索 | 12.2.13.23 | 16.2.40 |
| Google Play | 35.2.19-21 | 44.5.23-29 |
| Google Play開発者サービス | 20.45.16 | 24.50.34 |
試しに Google Play ストア から、MAP と Googelキーボード入力 を入れてみます。
これで一旦セットアップが完了しました。LinageOS19版はやや怪しい感は見られますが、機密情報入力やUSBメモリを控えれば使えることは使えそうです。
以上、Z4 Tablet Wi-Fi版をAndoroid11 or 12 相当にUpdateできました。しかしながら自分でやるのはメンドクサイ、忙しい、自身が無い方は、弊方でセットアップをお受けいたします。Tablet Wi-Fiは難易度低、約1.0時間の個人様向け工数+事務費で税込4,000円 。一部OSが古い機種があるよあで最新化してSETUPするのがベターなようです。その場合は+1,000円。ご相談、依頼はこちらから。
その他気付きですが、インストール時に SGP771 の表示が現れますが、インストールスクリプトの誤りのようです。